


Inkrementális forgó jeladó
- Bármilyen PPR - (Pulzus per fordulat) elérhető, egészen 16384-ig.
- Rugalmas méretezési funkcionalitás
- Kompakt méret – mindössze 36 mm-es átmérővel
- Választható rozsdamentes acél vagy nehézház verzió
- Nagy ütés és rázkódás-ellenállású
Termékkereső Inkrementális forgó jeladóhoz
Abszolút forgó jeladó
- Pozícióra vonatkozó információ fenntartása áramkimaradás esetén is.
- Wiegand Technológia – Nincs szükség tartalék akkumulátorra – Nincs szükség akkucserére.
- Kompakt méret – mindössze 36 mm-es átmérővel
- Rozsdamentes acél, ATEX és SIL jeladó elérhető
- Nagy ütés és rázkódás-ellenállású
Termékkereső aboszolút jeladókhoz
Lineáris jeladók
- Széles választékú mérési hosszok: 1- 10 m
- Abszolút pozíció mérés: 2 µm felbontásig
- Magas linearitás még hosszú ciklusidővel is.
- Alacsony költségek mégis robosztus konstrukció
- Skálázható analóg kimenet a mérési hosszhoz alkalmazkodva
Termékkereső lineáris jeladókhoz
Szögjeladó - Inklinométer
A dőlésszögek pontos mérése vagy a vízszintes helyzettől való eltérés meghatározása elengedhetetlen a legtöbb mozgásvezérlő rendszernél, de a biztonság érdekében egyaránt. A dőlésérzékelők egyszerű és hatékony módot jelentenek a térbeli tájékozódás számára, méghozzá mindenfajta mechanikai kapcsolódás nélkül – a tervezőmérnökök igazi előnye.
Nagy pontosság: 0,1°
Felbontás. 0,01°
Mérési tartomány: +/- 80° (kéttengelyes) illetve 360° (egytengelyes)
Termékkereső Szögjeladó - Inklinométer termékekhez
Közismert jeladó kimeneti jelek összehasonlítása
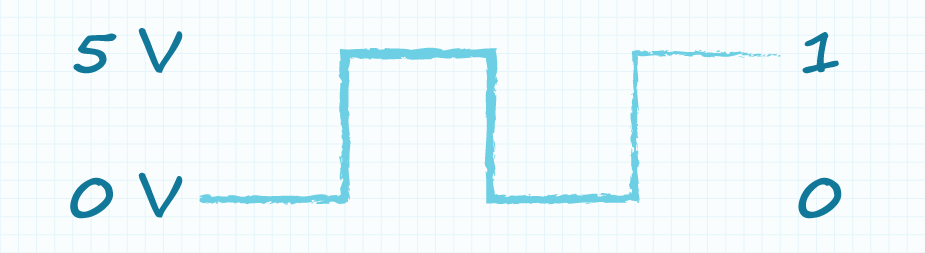
Legyen szó növekményes jeladó kvadratikus kimenetéről, kommutációs jeladó motor pólus kimenetről vagy soros interfészről, amely meghatározott protokollt használ, ezek a jelek mindegyike digitális, és magas / alacsony állapotú. Ez azt jelenti, hogy egy 5 V-os jeladó esetében a jelek mindig 0 V (földelés) között váltanak, amely alacsony vagy bináris 0, és 5 V között, amely magas vagy egy bináris 1. Ebben a bejegyzésben az inkrementális jeladó kimenetekre fogunk összpontosítani, amelyek alapvető négyszöghullám kimenetet biztosítanak.
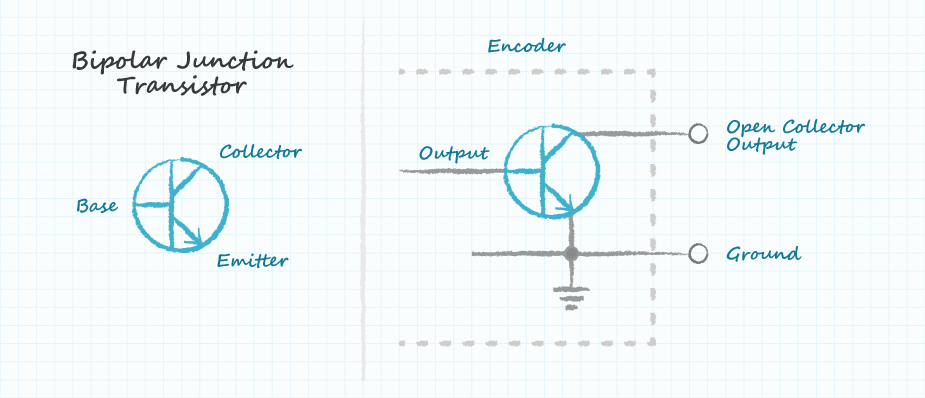
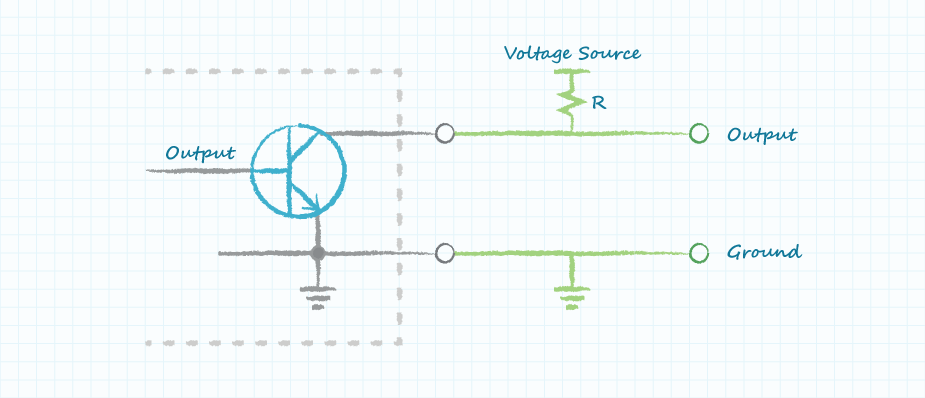
Open collector - Nyitott kollektoros kimenet
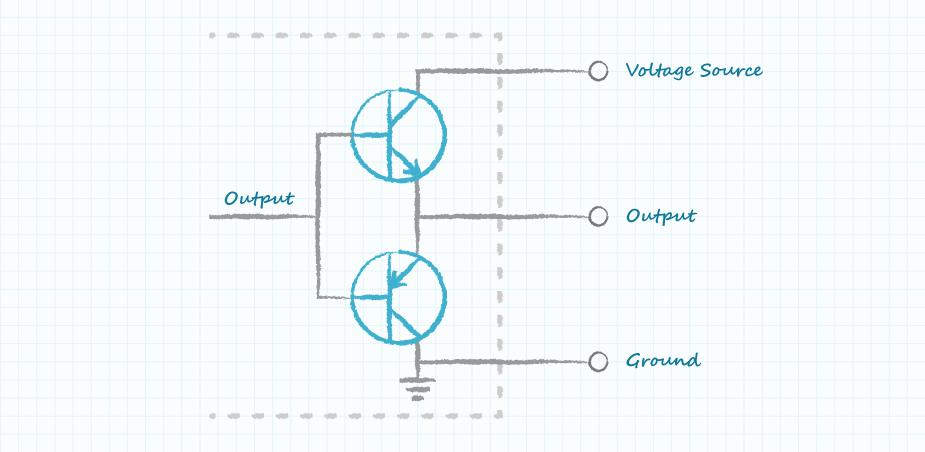
Push-Pull (Totem pole) kiement
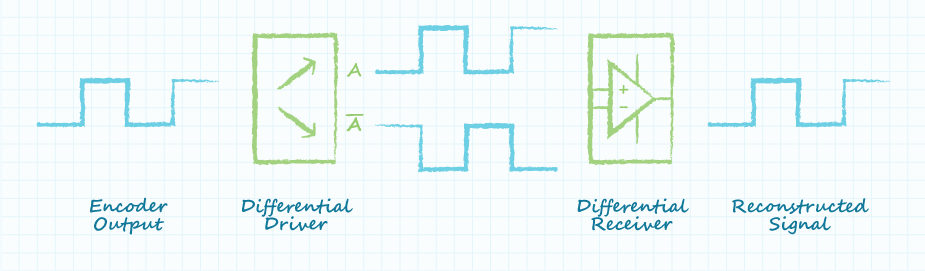
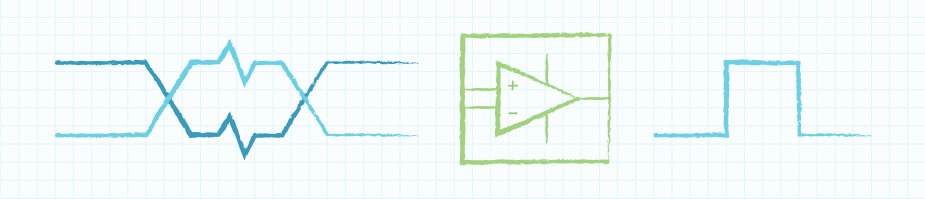
Differenciális Line Driver kimenet
Az egyvégű kimenetben a vevő mindig az átvitt jelet egy közös földre vonatkoztatja. Azonban hosszú kábelezési távolságokon, ahol a feszültség csökken, és az elfordulási sebesség csökken, gyakran előfordulnak jelhibák. Egy differenciál alkalmazásban a gazdagép előállítja az eredeti egyvégű jelet, amely aztán egy differenciális adóhoz kerül. Ez a távadó hozza létre a kábelezésen keresztül kiküldendő differenciálpárt. Két jel generálásával a vevő már nem a feszültségszintet a földhöz viszonyítja, hanem egymásra utalja a jeleket. Ez azt jelenti, hogy ahelyett, hogy konkrét feszültségszinteket keresne, a vevő mindig a két jel közötti különbséget nézi. A differenciális vevő ezután a jelpárt vissza alakítja egy egyvégű jellé, amelyet a gazdaeszköz a gazdagép által megkövetelt megfelelő logikai szintek segítségével értelmezhet. Az ilyen típusú interfész azt is lehetővé teszi, hogy a különböző feszültségszintű eszközök együtt működjenek a differenciális adó-vevők közötti kommunikáció révén. Mindez együtt működik annak érdekében, hogy leküzdje azt a jelromlást, amely egy végű alkalmazás esetén következett volna be nagy kábelezési távolságokon.
Az inkrementális jeladó, vagy más néven Incremental encoder működése
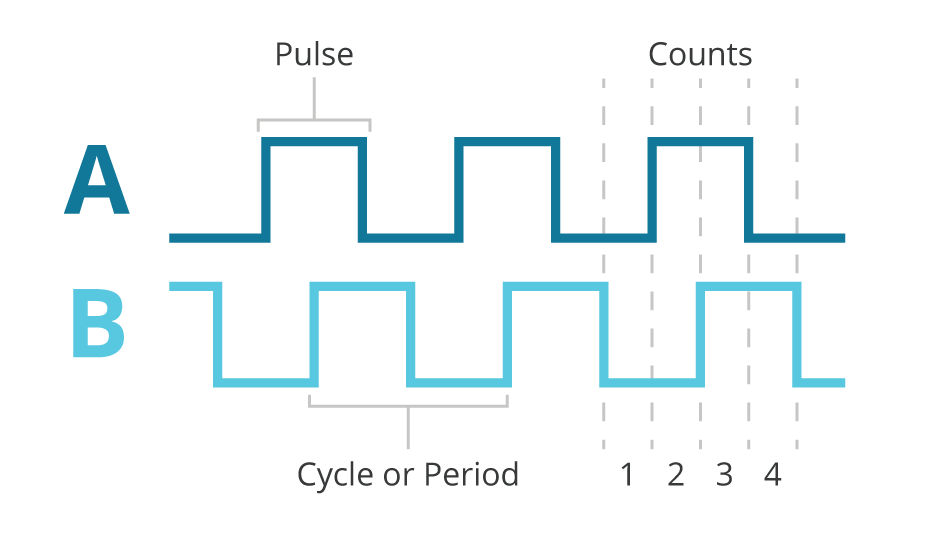
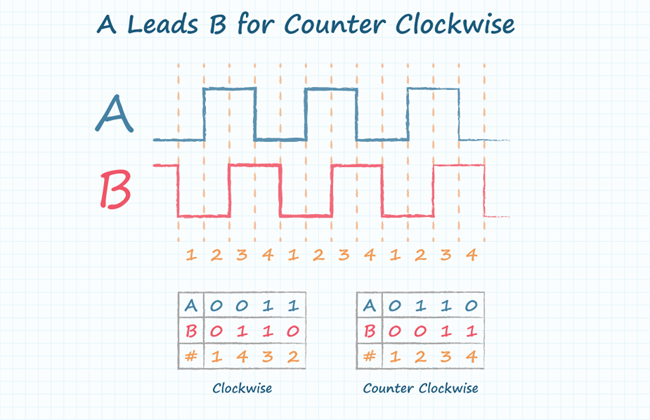
A forgás irányát úgy tudja az inkrementális jeladó (encoder) megállapítani, hogy mivel az A és a B jel eltolva jelenik meg, más lesz a jel hullámának a mintája, amit az inkrementális jeladó (encoder) számlál. Ha a tengely előre forog, akkor ezt a számlálót növeli az inkrementális jeladó (encoder), ha hátra, akkor az inkrementális jeladó (encoder) csökkenti ezt a számot. Az inkrementális jeladót (encodert) jellemzi a felbontása, ettől függ, hogy mekkora a legkisebb elfordulása a tárcsának. Az inkrementális jeladóknál (encodereknél) ezt impulzus/fordulatban lehet megadni, ami több ezer impulzus/fordulat is lehet.
Létezik másfajta jeladó is, az abszolút jeladó (encoder) többek között abban különbözik az inkrementális jeladótól (encodertől), hogy ott a tárcsán nem egyszerű rovátkák vannak, hanem a tárcsa sávokra van osztva, amiket bináris kódokként értelmez a jeladó, itt nincs szükség számlálóra. Ez a fajta jeladó a kialakítása miatt drágább, mint az inkrementális jeladó (encoder).
Az inkrementális jeladók hátrányai
Az inkrementális jeladó (encoder) hátránya az elmozdulás relativitásából adódik, ugyanis az inkrementális jeladót legtöbbször a motor tengelyére szerelik, ami forgó mozgást végez az alkalmazása során.
A jeladóval szerelt gép kezelése általában komplexebb vezérlést igényel, emiatt az inkrementális jeladós (encoderes) gép kezelése is körülményesebb, mint inkrementális jeladó (encoder) nélkül.
Az inkrementális jeladó (encoder) áramtalanítása során a számláló memóriája elvész, valamint a kikapcsolt gép mozgó alkatrészeinek a mozgását nem rögzíti.
Az abszolút jeladó, vagy más néven Absolute encoder működése
A helyes választás fontos, ezért állítottuk össze ezt a rövid útmutatót az abszolút forgó jeladókról, hogy segítsen megérteni, mik ezek, miben különböznek az inkrementális jeladóktól, és milyen helyzetekben lehet szüksége az abszolút forgó jeladókra.
Az abszolút jeladó minden forgási pontban egyedi pozícióértéket vagy adatszót biztosít, amely a kódoló „abszolút” pozícióját képviseli. A bekapcsolás pillanatától kezdve az abszolút jeladó meg tudja mondani a forgó tengely pontos helyzetét, amelyet mér. Ezt egy optikai, mágneses vagy kapacitív érzékelő segítségével teszi, amely egyedi kódot olvas le a tengellyel együtt forgó lemezről. Lényeges, hogy egy abszolút jeladó ezt meg tudja tenni anélkül, hogy el kellene forgatnia a tengelyt, és nyomon tudja követni ezt a pozíciót még átmeneti áramkimaradás esetén is. Minél több egyedi kód van a kódoló lemezén, annál pontosabb lesz a pozícióolvasás.
Single Turn abszolút jeladó:
Az egyfordulatú jeladók, más néven Single Turn abszolút jeladó egy teljes fordulaton, 360°-ban szolgáltatnak pozicionálási adatokat, a kimenet a tengely minden fordulatánál megismétlődik.
Multi turn abszolút jeladó:
A többfordulatú jeladók vagy más néven Multi Turn abszolút jeladók egyetlen fordulaton keresztül is szolgáltatnak pozicionálási adatokat, de rendelkeznek egy további „fordulat” számlálóval, amely méri a fordulatok számát.
Abszolút jeladó vs. Inkrementális jeladók
Ezzel szemben az inkrementális jeladó úgy működik, hogy impulzusokat generál, amikor a tengely forog. Egy tipikus inkrementális jeladó 2 négyzethullámot generál 90 fok eltolással a fázison kívül. Ezeket az impulzusokat a jeladón kívüli elektronikának kell követnie vagy számolnia.
Mivel az Inkrementális jeladó kimenete a 4 ismétlődő állapotból csak 1-ben van, a jeladót egy ismert rögzített helyre vagy "Home" pozícióra kell hivatkozni, hogy értelmes helymeghatározási információkat biztosítsanak. Az Home helyről, gyakran az enkóder indeximpulzusához igazítva, nyomon követhető a tengely inkrementális forgási változása, és megismerhető a tengely abszolút helyzete. Ennek meg kell történnie minden alkalommal, amikor bekapcsolja az inkrementális jeladót, vagy átmeneti áramkimaradás esetén. Következésképpen tovább tart az abszolút pozíció leolvasása – és a tengelynek forognia kell ahhoz, hogy ezt biztosítsa.
Az inkrementális jeladók kevésbé bonyolultak, mint az abszolút modellek, ezért jellemzően olcsóbbak (bár az árkülönbség csökken). Ha csak a sebességet, a mozgás irányát vagy a relatív pozíciót figyeli, általában az inkrementális forgó jeladó a legjobb megoldás, de ha az abszolút pozíció a legfontosabb, akkor az abszolút forgó jeladó a megfelelő megoldás.
Először is, mivel egy abszolút jeladó fenntartja a tengely helyzetét, a pozíció azonnal ismertté válik, amint áramot ad rá. Nem kell megvárnia a beállítási vagy kalibrálási szekvencia befejezését, és gyorsabban megkaphatja a szükséges pozícióadatokat indításkor vagy áramszünet után, még akkor is, ha a tengelyt elfordították, miközben a jeladó ki volt kapcsolva.
Az indításkor fennálló abszolút pozíció ismerete sok rendszerben elengedhetetlen lehet, ahol bizonyos helyzetekben biztonságosan tovább lehet forgatni a tengelyt az egyik irányba, de a másik irányba nem. Alkalmazástól függően ennek hibás használata a berendezés károsodását, testi sérülést vagy még rosszabbat okozhat. Az ilyen helyzetekben nagyon fontos, hogy ismerje a forgó eszköz pontos helyzetét, mielőtt bármely alkatrész elmozdulna.
Ugyanilyen fontos, hogy az abszolút jeladó valós időben biztosítja a valós pozíciót. Mivel egyre több rendszer válik digitálissá, központi kommunikációs buszra csatlakozva, a jeladó valós idejű helyzetének lekérdezése, amikor és amikor szükséges, minimális késleltetéssel, nagy előnyt jelent. Ahhoz, hogy egy Inkrementális forgó jeladóval nyomon tudja követni pozícióját, még a homing szekvencia után is követnie kell az összes impulzust külső áramkörrel (jellemzően kvadratikus (négyzetes) dekódolással). A szükséges külső áramkörön kívül ez azt is jelenti, hogy van némi késleltetés a pozíció meghatározásában.

Ehhez kapcsolódik az a tény, hogy viszonylag egyszerű egynél több abszolút jeladót kombinálni ugyanabban a rendszerben – esetleg gyár automatizáláshoz vagy több csuklós robotkarban. Ha Inkrementális jeladót használ, a több eszköz kimeneteinek figyelése nagyon bonyolulttá válhat, és jelentős feldolgozási teljesítményt igényel. De az abszolút jeladókkal, különösen azokkal, amelyek egy központi kommunikációs buszhoz kapcsolhatók, mindegyiktől külön-külön kaphat adatokat, ami sokkal kevesebb feldolgozási teljesítményt igényel az olvasás értelmezéséhez.
Miután meghatároztuk az abszolút és inkrementális forgó jeladók közötti fő különbségeket, nézzünk meg röviden néhány konkrét forgatókönyvet, ahol abszolút jeladókat használnak.
A kulcsfontosságú piac a robotika – egy gyorsan bővülő terület, amely számos ágazatot lefed. A gyártásban megtalálhatóak az összeszereléshez, hegesztéshez, festékszóráshoz és egyéb feladatokhoz használt robotkarok. Az egészségügyben is megtalálod őket. A távsebészet például nagy mennyiségű, kivételesen pontos helyzetinformációt igényel a robotkaroktól. Az otthoni segítségnyújtó robotok az abszolút jeladók másik feltörekvő használati esetei.
Ez azonban csak egy terület, mivel egyre több rendszer válik digitálissá, és az inkrementális és abszolút jeladók közötti árkülönbség csökken, az abszolút jeladók alkalmazási köre szinte végtelenné válik, mind az ipari, mind a fogyasztói piacokon. Az automatizált kapuktól és kameraforgató mechanizmusokon át a gyári automatizálásig az abszolút jeladók rendkívül hatékony és egyre inkább költségkímélő módot jelentenek a pozíció meghatározására.
Az abszolút forgó jeladó előnyei
Alapvető fontosságú a megfelelő típusú jeladó kiválasztása a terméktervezéshez, ezért annyira fontos megérteni az inkrementális és abszolút jeladók közötti fő különbségeket. Az árkülönbségek megszűnésével és a technológiai változásokkal az abszolút jeladók számos különálló előnnyel rendelkeznek az inkrementális jeladó társaikkal szemben, így érdekes lehetőséget biztosít a pozíció-visszajelzési követelmények teljesítésére.
Mi a különbség az Inkrementális jeladó PPR, CPR és LPR fogalmai között?
PPR - Pulzus fordulatonként (Pulse Per Revolution)
CPR - Számolások fordulatonként (Counts Per Revolution)
LPR - Vonalak fordulatonként (Lines Per Revolution)
Ahogy egy inkrementális jeladó forog, két négyszögletes A és B kimeneti jelet állít elő; ezek a jelek együtt egy inkrementális forgó jeladó kvadratikus kimenetét hozzák létre. A legtöbb jeladó esetében ezek az A és B négyszöghullámok 90 fokkal fázison kívül eltolva vannak. Az A és B kimenetek változó állapotának megfigyelésével meghatározható a jeladó iránya.
Impulzusok fordulatonként (PPR)
Az Autonics és Posital gyártó is PPR vagy Pulses per Revolution kifejezést használja a forgó jeladó felbontásának kifejezésére. A PPR azt írja le, hogy a forgó jeladó hány magas impulzusa lesz az A vagy B négyszöghullám kimenetén egyetlen fordulat alatt. Noha az Autonics nem használja a PPR-t a periódusok fordulatonkénti megjelenítésére, technikailag még mindig pontos lenne, mivel a növekményes (Inkrementálsi) jeladók szabványos kínálatának kihasználtsága 50%. Ha a felbontás ismert, akkor kiszámítható, hogy az egyes impulzusok és periódusok hány mechanikai fokkal egyenlőek.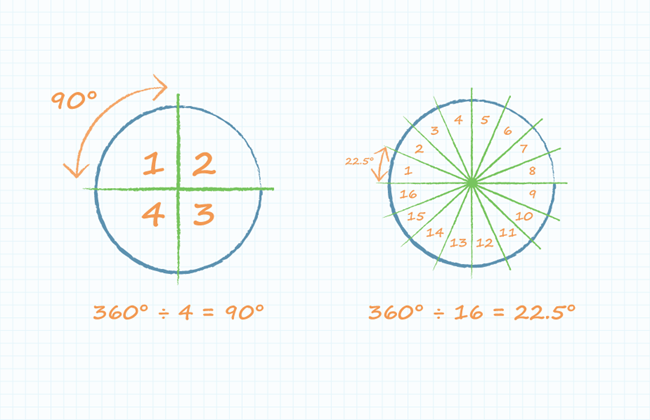
Számolások Fordulatonként (CPR)
A CPR leggyakrabban a Counts per Revolution kifejezést jelenti, és a kvadratikusan dekódolt állapotok számát jelenti, amelyek a két A és B kimenet között léteznek. Ha mindkét A és B kimenet magas és alacsony között vált, akkor 2 bitnyi információ létezik 4 különálló formában (Állapotok). A kvadratikus dekódolás kifejezés azt a módszert írja le, hogy az A és B kimenetet együtt használják az egyes állapotváltozások számlálására. Ez az egyes impulzusokhoz vagy periódusokhoz tartozó számok 4-szeresét eredményezi. Ezért egy jeladó CPR-je a jeladó PPR-je szorozva 4-gyel. Azt is meg kell jegyezni, hogy egyes jeladó gyártók a CPR rövidítést használják a ciklusonkénti ciklusok jelentésére. A ciklusok fordulatonként a teljes elektromos ciklusokra vagy periódusokra utalnak a jeladó kimenetek bármelyikén, és egyenértékű az impulzusok fordulatonkénti értékével. Ha a Counts per Revolution és a Cycles per Revolution ugyanazt a CPR betűszót használja, de 4-szeres eltérést mutat, ez érthető módon némi zavart okozhat, és óvatosnak kell lenni a felbontás meghatározásának megértésében.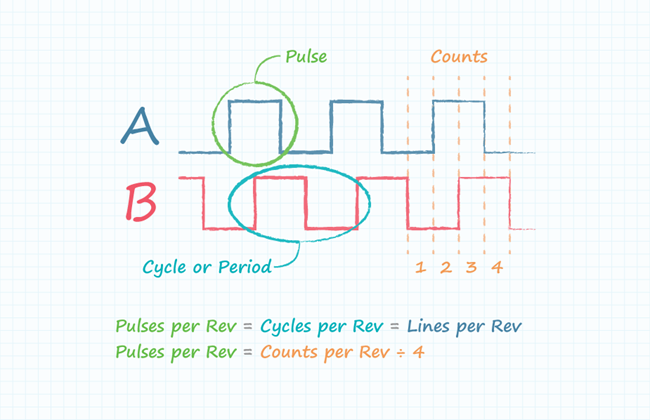
Vonalak fordulatonként (LPR)
Az LPR vagy vonalak fordulatonként egy másik kifejezés, amely egyenértékű a PPR-el. A vonal az optikai enkóder lemezére maratott vagy nyomtatott sávokra vonatkozik. Az optikai jeladó lemezen minden sor alacsony impulzust jelentene a kimeneten, mivel egy az egyhez viszonyban vannak.Mivel a felbontást az iparágban eltérően határozzák meg, fontos, hogy a számokat azonos formátumba állítsa be a különböző jeladó gyártók termékeinek összehasonlításakor. Ezt legjobban úgy teheti meg, ha megtekinti a hullámformákat vagy az időzítési diagramokat az adatlapon, és ha lehetséges, kiszámítja az impulzusszélességet fokokban vagy ívpercekben.
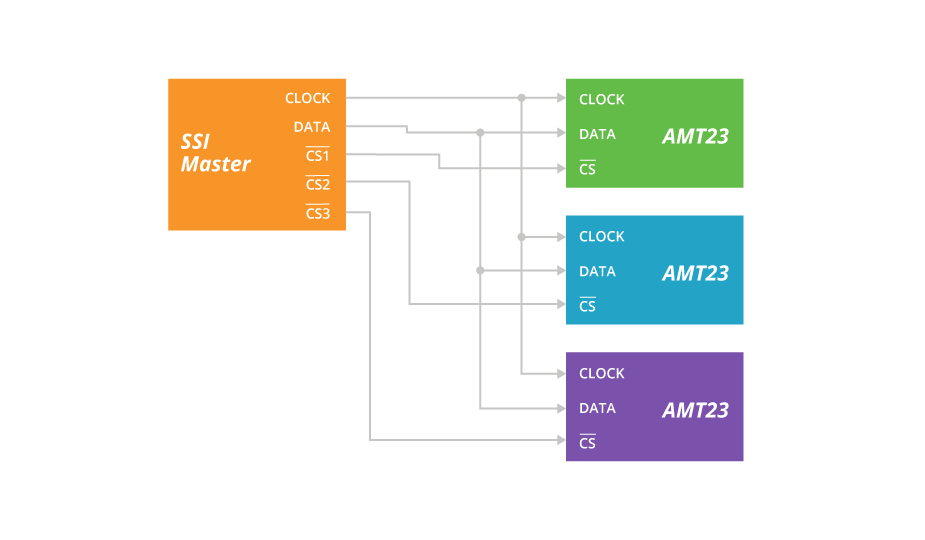
SSI Abszolút jeladó
Az SSI tipikusan egy szinkron szimplex egyirányú master-slave kommunikációs protokoll, amely differenciális jelzést használ, és nincs chip-választó jele. Ez egyszerű és olcsó csatlakozást tesz lehetővé az enkóderhez, dinamikus fordulatszám-beállítással, miközben kihasználja a differenciálcsatlakozás magas zajállóságát.
Az Autonics és Posital - Fraba abszolút kódolója az SSI egy olyan változatát valósítja meg, amely egyetlen vezetéket takaríthat meg az egyvégű kommunikációval és egy chip-választó kapcsolat használatával, amely lehetővé teszi, hogy a gazdagép aktiválja az egyes kódolókat a buszon. Az SPI-vel ellentétben a gazdagép nem küld parancsokat. A kódoló pusztán úgy reagál, hogy pozícióadatokat helyez a buszra, leegyszerűsítve az interfészt a gazdagép és a kódolók között. Az Autonics és Postial - Fraba, SSI interfésze kompatibilis az olyan készen kapható SSI-vezérlőkkel, amelyek chip-kiválasztást is tartalmaznak. A tipikus csatlakozási hossza és zajteljesítménye hasonló az SPI-hez.
Mágneses és Optikai jeladók karakterisztikája
Mágneses jeladók
A váltakozó pólusú, forgó mágnesezett korongból és egy hall-effektusból vagy mágneses ellenállású érzékelőből álló mágneses jeladó a mágneses fluxusmezők változásainak érzékelésével működik. A mágneses jeladó masszív, és nagyon jól megbirkózik az ütésekkel és a rezgésekkel, miközben nem befolyásolja az olaj, szennyeződés és nedvesség behatolása. Hátránya, hogy érzékenyek az elektromos motorok által okozott mágneses interferenciára, és korlátozott működési hőmérséklet-tartományuk van. Bár számos fejlesztés történt a mágneses jeladókban, általában alacsonyabb felbontást és pontosságot biztosítanak, mint az optikai jeladók.